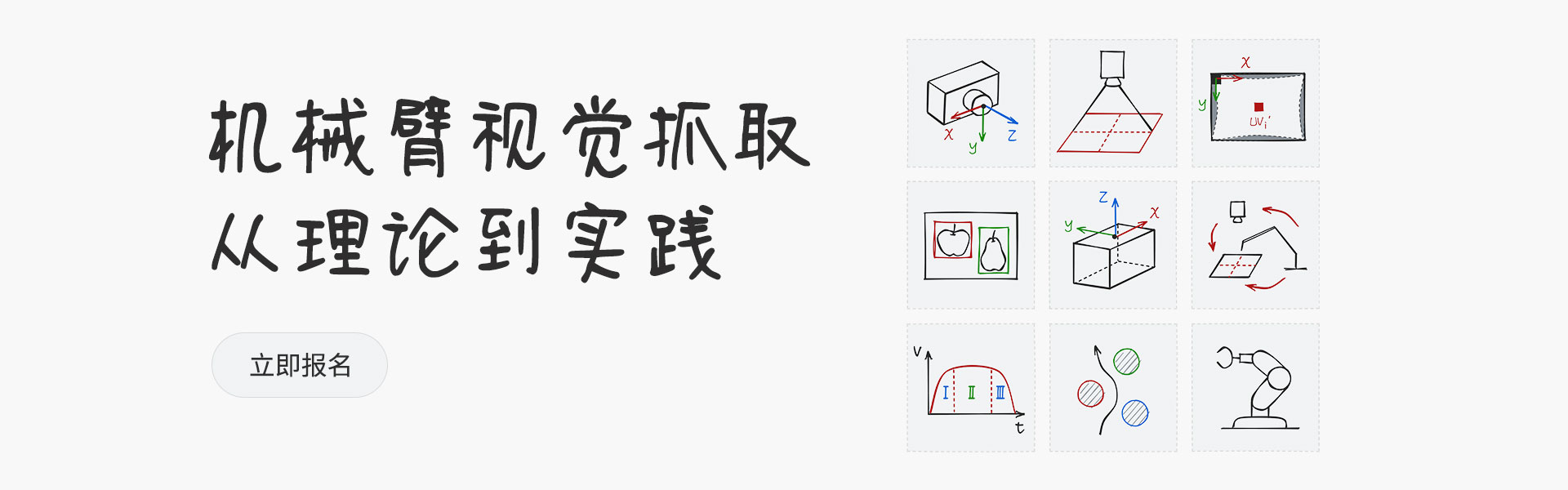
讲解了实现机械臂视觉抓取所需的基础知识与项目实践。涵盖:刚体空间变换与位姿描述、机械臂正逆向运动学求解、计算机视觉、深度学习目标检测。

提供了Astra 3D相机在Windows与Linux操作系统下的开发环境配置指南,以及阿凯老师写的Astra 3D相机Open3D版本的SDK使用说明。

提供了Gemini2 3D相机在Windows与Linux操作系统下的开发环境配置指南,以及阿凯老师写的Gemini2 3D相机Open3D版本的SDK使用说明。

机械臂基础使用说明 (接线/上位机/开发环境配置) ,以及自研Python SDK的API示例代码。同时也提供了机械臂轨迹规划的PyBullet仿真案例。

串口总线舵机版二指柔性自适应夹爪的使用说明。 包含: 机械结构安装说明; 夹爪运动学推导; 在Ubuntu下配置端口号; 夹爪的PythonSDK示例代码。

Jetson Nano开发板的开发环境配置与硬件使用,软件基础 (Linux命令行/Git) 与硬件资源 (GPIO) 的控制。

涵盖Python开发环境配置,Jupyter Notebook的使用,NumPy矩阵运算,SymPy公式自动推导等内容。

Innfos Gluon六轴协作机械臂本体,以及末端执行器的使用手册。除了阿凯自研的Python SDK使用说明外,还提供了官方软件生态的源码分析。

以机械臂的视角学习ROS2,结合PyBullet机器人仿真与机械臂真机控制,从零搭建ROS2 MoveIt2机械臂运动控制系统。

计算机视觉入门先看它. 详细的API文档讲解,视觉算法原理深入浅出,助你快速上手OpenCV。

Ubuntu快速入门教程,提供必要的背景知识,讲解Ubuntu命令行,熟悉Ubuntu基本的文件操作,也教会你如何学习Ubuntu。

机械臂运动学求解的核心是理解空间变换,课程的目标是让你可以运用机械臂运动学的知识,对物块进行定点抓取。
